
 サーボを取り付けリンゲージが終わったら、付属のサーボカバーを取り付けます。
サーボを取り付けリンゲージが終わったら、付属のサーボカバーを取り付けます。
今回しようしたTMS0605サーボは、このステルスのサーボの取り付けスペースにピッタリサイズでした。
 サーボが取り付けられたら、胴体のメカスペースにメカを搭載します。
サーボが取り付けられたら、胴体のメカスペースにメカを搭載します。
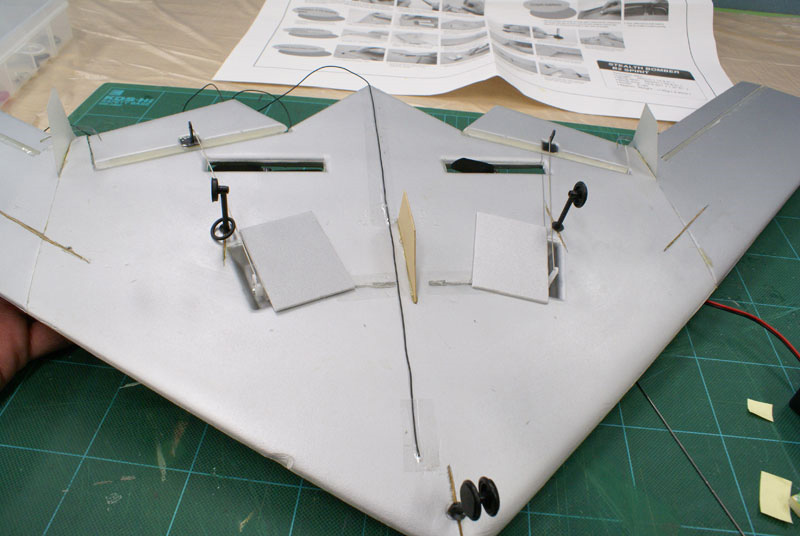
裏面に重心位置の印が付いているのでそれにあわせるようにします。
今回は、写真のように受信機を機首の部分に取り付け、リポがちょうど重心位置の上ぐらいに来るようにするとちょうどになりました。
 アンテナのリード線は、機首の部分に小さな穴を開けそこから裏面の中央部分にテープで固定しておきます。
アンテナのリード線は、機首の部分に小さな穴を開けそこから裏面の中央部分にテープで固定しておきます。
このとき、特に左右のプロペラの間の部分は、しっかり固定しておかないとリード線がプロペラに巻き込んでしまうので注意します。
GWS製の受信機の場合は、アンテナのリード線が短いので機体後方から余って出る分も少ないのですが、Tahmazoの受信機の場合は、500m以上の電波到達距離があって安心な分だけ、リード線も長くなっているので飛行させる際にも巻き込みに注意が必要です。
 メカボックスのカバーは、両面テープの付いたフックが付属しているので機体とカバーへのフックの取り付け位置を合わせて取り付け輪ゴムを引っ掛けて固定します。
メカボックスのカバーは、両面テープの付いたフックが付属しているので機体とカバーへのフックの取り付け位置を合わせて取り付け輪ゴムを引っ掛けて固定します。
 後は、付属のデカールを貼ってやると結構スケール感の有る機体に仕上がります。
後は、付属のデカールを貼ってやると結構スケール感の有る機体に仕上がります。
リポを含んだ状態で重量を測ったら、123gで仕上がりました。
カタログデータより軽量に仕上がり、バッテリーの容量は、約3.5倍になっているので、飛行時間も10分以上は、期待できそうです。
連休のインドアで初飛行の予定をしてますので、またレポートをします。



















{kind=link}
{kind=link}